
大規模環境レーザ計測点群処理は、大型設備や構造物、市街地や自然環境のレーザ計測で得られた点群を、対象の保守、検査、計画、維持管理に活用するためのデータ処理技術である。
詳細
大規模環境レーザ計測技術の利用
数十メートル先から数キロメートル先の物体の3次元計測が可能な中・長距離レーザ計測器により、プラント、船舶、建築などの大型構造物、道路、トンネル、橋梁などの社会インフラ、森林などの自然環境、遺跡や文化財といった、大規模環境の3次元計測が可能になっている[1]。レーザ計測により得られるデータは3次元の点の集合であり、点群 ( Point Cloud ) と呼ばれる。点群は、プラント、土木、測量、建築、文化財、エンターテイメント、考古学、法廷問題の幅広い分野において、対象の保守、検査、計画、維持管理、デジタルアーカイブなどに利用されている。
レーザスキャナの種類と測距方式
大規模環境のレーザ計測には、航空機搭載型レーザスキャナ(Airborne Laser Scanner、ALS)、車載型(移動式)レーザスキャナ(Mobile Laser Scanner、MLS)、地上設置型レーザスキャナ(Terrestrial Laser Scanner、TLS)が主に用いられている。車載型レーザスキャナはMobile Mapping System(MMS)とも呼ばれる。レーザによる測距方式は、光パルスの飛行時間を計測する光飛行時間計測(Time-of-Flight、TOF)方式と、変調したレーザ光の位相差を比較する位相差検出方式の2つが採用されている。一般的に、光飛行時間計測方式は長距離計測が可能であり、機種によっては1kmを超える長距離計測が可能なものもある。位相差検出方式は、光飛行時間計測方式に比べ短距離の計測となるが、単位時間当たりの計測点数が非常に大きいという特徴がある。ただし、最近では光飛行時間計測方式においても、高速な計測ができる機種が開発されており、技術的にはまだ進化が続いている。
大規模環境のレーザ計測点群
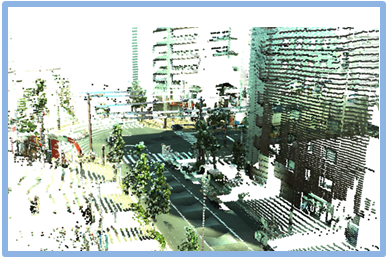
中・長距離レーザ計測で得られる点群の各点は、xyz座標値の情報に加え、レーザの反射強度 ( Intensity )、反射パルス番号 ( Pulse return number )、パルスの反射波形 ( Full waveform )、点の取得時刻(UTC時刻など)、サーマルセンサによる温度情報、ディジタル画像による色情報が付与される場合がある。点群は、オクル―ジョン(遮蔽)による欠損、高いレベルの計測ノイズ、物体境界付近における大量の異常値、大きな点密度差、不均一な点分布(スキャンライン)、莫大なデータ量(数千万点~数十億点以上)など、安定かつ高速なデータ処理を困難にする特徴を持つ。屋外環境では自然物と人工物が混在しており、スケールや形状の複雑さが大きく異なる物体が点群内に含まれている(図1)。
レーザ計測点群処理
主なレーザ計測点群処理を以下に記す。
フィルタリング(Filtering)
点群から計測ノイズや異常値を取り除く。特定の物体を表す点を除去する処理(たとえば数値地形モデル(Digital Terrain Model、DTM)作成のための建物や樹木等の地物除去)や、点の間引き処理にも本用語は用いられる。
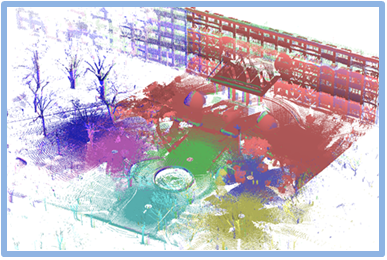
レジストレーション(Registration、位置合せ)
異なる場所からTLSにより計測して得た点群同士や、異なる計測システムで得られた点群同士の位置と姿勢を調整し、対象を正確に表現する統合点群を得る。点群内の対応を一致させる座標変換を推定し、点群に適用する(図2)。
特徴抽出(Feature Extraction)
点群の表す形状の法線や曲率などの幾何特徴量を推定する。法線や近似曲率の推定には主成分分析(Principal Component Analysis、PCA)がよく用いられる。
セグメンテーション(Segmentation)
点群を物体ごとや曲面ごとの部分点群(セグメント)に分割する。領域成長法やHough変換、RANSAC ( RANdom SAmple Consensus )[2]がよく用いられる。
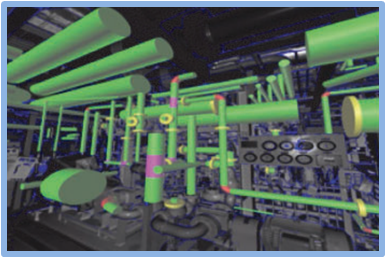
曲面/プリミティブ抽出(Surface/Primitive Extraction)
点群から解析曲面やプリミティブ形状を抽出する。領域成長法やHough変換、RANSAC、最小自乗法がよく用いられる。プラントや設備の計測点群に対しては、特に平面と円筒面の正確な抽出が求められる(図3)。
表面再構成(Surface Reconstruction)
点群から計測対象物の表面を再構成する。表面モデルとしてメッシュモデルやポリゴンモデルを生成する。
物体認識(Object Recognition)
点群内に含まれる物体を認識する。手続き型手法、機械学習に基づく手法、モデルベース手法などがある。プラントや設備においては、規格の識別や、部品間の連結情報の認識が求められる。
CADモデル生成(CAD Model Generation)
点群から設備や環境のCADモデルを生成する。プラントや土木、建築の分野においては、点群から生成されたモデルはAs-Builtモデルと呼ばれる。
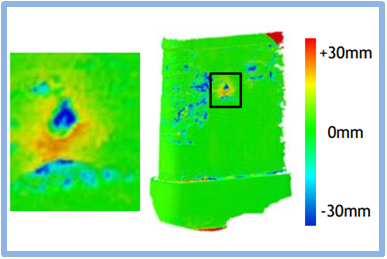
変化検出(Change Detection)
異なる時期に取得した点群間の差分を検出する。環境の変化の認識や、構造物の変形の解析および劣化診断を行う(図4)。
現在、点群データ処理向けのフリーソフトウェアやオープンソースライブラリが利用可能である[4-6]。安定かつ効率的なデータ処理のために、点の取得規則に関する情報や、対象の形状に関する知識、直交性に関する仮説[7]などが用いられる。
外部リンク
引用
- 金井理他,特集:大規模環境の3次元計測と認識・モデル化技術,精密工学会誌,Vol. 79, No. 5, 2013
- Martin A. Fischler and Robert C. Bolles, Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography, Communications of the ACM, Vol. 24, No. 6, pp.381-395, 1981
- 松岡諒,増田宏,大規模点群からの生産設備の形状再構成,精密工学会誌, Vol. 80, No. 6, 604-608, 2014
- PCL:Point Cloud Library, http://pointclouds.org/
- CloudCompare, https://www.cloudcompare.org/
- MeshLab, http://meshlab.sourceforge.net/
- Carlos A. Vanegas, Daniel G. Aliaga, and Bedřich. Beneš, Building Reconstruction using Manhattan-World Grammars, Proceedings of Computer Vision and Pattern Recognition (CVPR), pp. 358-365, 2010