
力覚フィードバック ( force feedback ) とは、システムが物体と接触した際の力覚情報を人間に対して帰還し、知覚させることである。
詳細
力覚フィードバックにおいては、疑似環境からの力覚信号をコンピュータ内でシミュレートして生成しフィードバックする「仮想世界での力覚フィードバック」と、実際の物体と接触した際に得られる力覚情報をハプティックシステム(ハプティックインタフェース)を通じて人間にフィードバックする「実世界での力覚フィードバック」とがある。前者はバーチャルリアリティ技術に関連するものであり、後者はロボットの遠隔操作技術に主として関連するものである。
実世界での力覚フィードバック
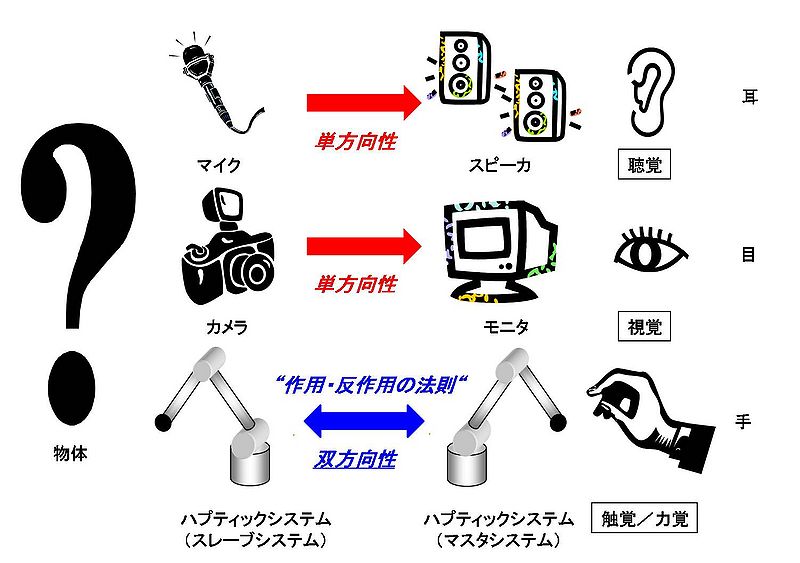
人間の五感情報のうち、視覚情報や聴覚情報は単方向性の信号である。このことは、対象の物体を見たり、対象の音を聞いたからといって、対象物に対して物理的な反作用が及ばないことを意味している。それに対し、触覚情報あるいは力覚情報は、ニュートンの第三法則(作用・反作用の法則)に支配される情報であるため、人間(あるいはシステム)と環境との間での物理的なインタラクションが本質となる、双方向性の信号である。したがって、実際の力覚情報をフィードバックするためのシステムは、厳密なリアルタイム性と双方向性が要求される。
力覚フィードバックシステム
実際の物体からの力覚フィードバックを実現するためのシステム(ハプティックシステム)は、上述のリアルタイム性と双方向性を獲得するために、マスタ・スレーブシステムの構造をとることが多い(三台以上の複数台のシステムから全体が構成されることもある)。マスタシステムとスレーブシステムの位置追従(位置制御)と、両者の間での工学的な作用・反作用の法則の実現(力制御)とを理想的に同時に達成することで、初めて鋭敏な力覚フィードバックが実現される [1-3]
関連項目
外部リンク
引用
- 林田宣宏,矢向高弘,村上俊之,大西公平,ツインドライブシステムを用いたセンサレスバイラテラルロボットマニピュレータ, 精密工学会誌,Vol. 67, No. 11, pp. 1834-1838, 2001.
- 鈴木祐介,桑原央明,佐藤正尭,見上慧,大西公平,フレキシブルアクチュエータを用いたマスタ・スレーブ同機構型ロボットハンドによる力覚伝達,精密工学会誌,Vol. 76, No. 8, pp. 938-944, 2010.
- Kouhei Ohnishi, Seiichiro Katsura, and Tomoyuki Shimono, Motion Control for Real World Haptics, IEEE Industrial Electronics Magazine, Vol. 4, No. 2, pp. 16-19, June, 2010.
執 筆 :大西 公平